INDUSTRY NEWS
Basic concepts of brushless motors
The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a product of the combination of modern electronics (including electronic power and microelectronics), control theory and motor technology. Unlike ordinary brushed DC motors that use armature windings to rotate and commutate, brushless motors are motors that use electronic commutation and rotate magnets. Ordinary DC motors are commutated using carbon brushes, which have major drawbacks, mainly including.
1, mechanical commutation of sparks generated by the commutator and brush friction, electromagnetic interference, noise, short life.
2, complex structure, poor reliability, more failures, requiring frequent maintenance.
3, due to the presence of commutator, limit the further decline of rotor inertia, affecting the dynamic performance.
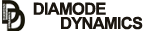
Brushless motor is not a complete power system, brushless basically must be controlled by brushless controller also known as ESC to achieve continuous operation. Whereas an ordinary carbon brush motor rotates a winding, a brushless motor rotates a magnet regardless of whether it is an external or internal rotating structure. Any motor is made up of a stator and a rotor.
Stator: The stator of a brushless motor is the part that generates the rotating magnetic field and is able to support the rotor for rotation, mainly consisting of silicon steel sheets, enamelled wires, bearings and support parts.
Rotor: The rotor of a brushless motor is the part that is glued to the NdFeB magnet and rotates under the action of the rotating magnetic field of the stator, mainly consisting of the rotor shaft, magnet and supporting parts.
Distinction between brushless motors and other motors.
It is important to note that we have to distinguish brushless from other types of motors.
DC motors: also known as brush motors or carbon brushes, they are the oldest and most numerous type of motor available. They may be used in radios, printers, etc. This type of motor is the one that uses carbon brushes for commutation, and the brushless motor is named for this type of motor.
Asynchronous motors: This is a very common type of motor in our lives. Industrial power, exhaust fans and electric fans all use asynchronous motors. Asynchronous motors also do not have brushes, so occasionally they are called brushless motors, but the common definition of a brushless motor is what we call a brushless motor - BLDC.
Voltage ratings and KV values.
Rated voltage: that is, the suitable working voltage for brushless motors. In fact, brushless motors are suitable for a very wide range of working voltages, and the rated voltage is a situation derived by specifying the load conditions. For example, a 2212-850KV motor with a specified load of 1045 propellers would have a rated working voltage of 11 V. If the load is reduced, e.g. with 7040 propellers, the motor would work perfectly well at 22 V. However, this working voltage is not infinite. But this operating voltage is not infinitely rising either, and is mainly limited by the maximum frequency supported by the electronic controller. So the rated operation is determined by the operating environment.
KV value: Brush DC motors are marked with the rated speed according to the rated operating voltage. Brushless motors introduce the concept of KV value, while allowing the user to visualise the specific speed of the brushless motor at the specific operating voltage. The actual speed = KV value * operating voltage, which is the actual meaning of KV, that is the speed per minute at 1V operating voltage. The speed of a brushless DC motor is directly proportional to the voltage, the speed of the motor will increase linearly as the voltage rises. For example, the speed of a 2212-850KV motor at 10V is: 850*10=8500RPM (RPM, Revolutions Per Minute).
Torque and speed.
Torque: (torque, torque) the driving torque produced by the rotor in a motor that can be used to drive a mechanical load, we can understand the power of the motor.
Rotational speed: the speed of the motor per minute. We can simply understand that the motor output power = speed * torque, under the same power, torque and speed is a relationship between this and the other, that is, the higher the speed of the same motor, the lower the torque must be, the opposite also remains. It is not possible to require a motor to have a higher speed and a higher torque, this rule applies to all motors. For example, a 2212-850KV motor can drive a 1045 paddle at 11V. If the voltage is doubled, the speed is doubled and if the load is still a 1045 paddle, the motor will soon burn up due to a sharp rise in current and temperature.
Maximum current and maximum power.
Maximum current: the maximum current that the motor can withstand and operate safely
Maximum power: the maximum power the motor can handle and work safely Power = Voltage * Current
Each motor has its own power limit, the maximum power is this limit, if the operating conditions exceed this maximum power, it will cause the motor to burn out at high temperatures. Of course, this maximum power is also derived from the specified operating voltage situation. If it is at a higher operating voltage, the reasonable maximum power will also be increased. This is because: Q = I²R, the heat generated by a conductor is proportional to the square of the current, and at higher voltages, for the same power, the current will drop leading to less heat generation, making the maximum power increase. This explains why on professional aerial vehicles, a large number of 22.2V or even 30V batteries are used to drive multi-axis vehicles, brushless motors at high voltage, with less current, less heat and higher efficiency.
Nav
Hot News
-
Making an unmanned ship from scratch - a guide to the overal
 foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16
foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16 -
Basic concepts of brushless motors
 The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27
The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27 -
Waterproofing of brushless motors
 As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27
As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27