COMPANY NEWS
How can the unmanned ship realize autonomous cruise in the d
First of all, as an unmanned ship system, your control reference is a patrol range given by the mobile phone, so it is simple to process the latitude and longitude coordinates that can be considered as a quadrilateral area.
This information can be sent to your unmanned ship through mobile phone WiFi or Bluetooth, and then calculate the path or waypoint. This process is called path planning. The path-planning algorithm itself relies on a map, which requires input from a map to tell the unmanned ship where to navigate and where to go. There are many algorithms and tools to implement path planning. The Robot Operating System (ROS) framework is mostly used in academia.
The path planning software runs on the controller (such as Raspberry Pi) to realize various search-based, based Probabilistic, model-based path planning algorithms. The path given by the path planning will be used as a control reference and passed to the controller (PID, LQR, MPC, etc.) to guide the unmanned ship control mechanism (propeller, rudder) to achieve path following. A basic controller can be a position-based feedback control. Implementing such a controller requires position and attitude sensors (hardware GPS, IMU) and control algorithms (software). Vision-based target tracking is a hot topic at present, and vision is a part of perception in robotics.
Like the given target path of the mobile phone WiFi, the target position obtained through the camera can also be directly passed to the path planning module.
After the target tracking is completed, it can be switched back to the original control path to continue cruising. In open water, the entire water area can be divided into several small blocks without considering the interference of obstacles, and the method of setting the target point in the center of each small block can realize the most basic cruise control. You can start with this most basic function and gradually improve your robot.
This information can be sent to your unmanned ship through mobile phone WiFi or Bluetooth, and then calculate the path or waypoint. This process is called path planning. The path-planning algorithm itself relies on a map, which requires input from a map to tell the unmanned ship where to navigate and where to go. There are many algorithms and tools to implement path planning. The Robot Operating System (ROS) framework is mostly used in academia.
The path planning software runs on the controller (such as Raspberry Pi) to realize various search-based, based Probabilistic, model-based path planning algorithms. The path given by the path planning will be used as a control reference and passed to the controller (PID, LQR, MPC, etc.) to guide the unmanned ship control mechanism (propeller, rudder) to achieve path following. A basic controller can be a position-based feedback control. Implementing such a controller requires position and attitude sensors (hardware GPS, IMU) and control algorithms (software). Vision-based target tracking is a hot topic at present, and vision is a part of perception in robotics.
Like the given target path of the mobile phone WiFi, the target position obtained through the camera can also be directly passed to the path planning module.
After the target tracking is completed, it can be switched back to the original control path to continue cruising. In open water, the entire water area can be divided into several small blocks without considering the interference of obstacles, and the method of setting the target point in the center of each small block can realize the most basic cruise control. You can start with this most basic function and gradually improve your robot.
Nav
Hot News
-
Making an unmanned ship from scratch - a guide to the overal
 foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16
foreword First of all, if an unmanned ship is to be unmanned, it must be able to run by itself; to run by itself, it must know its own GPS co ...2022-06-16 -
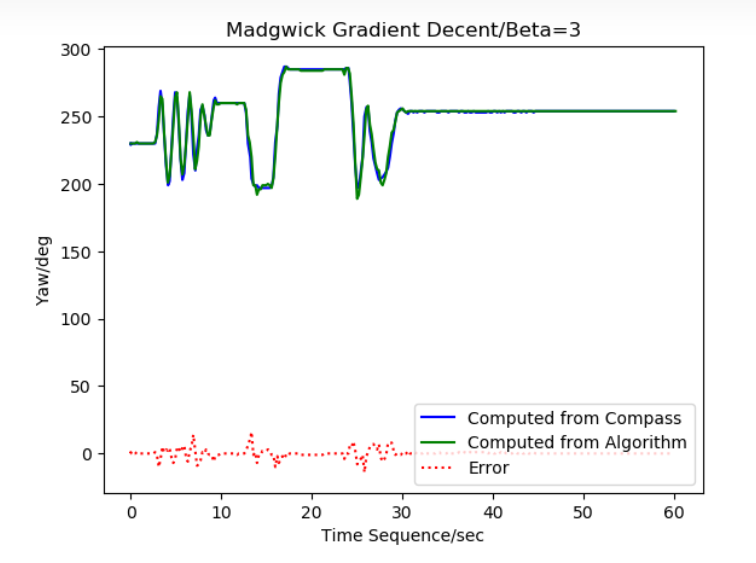
Basic concepts of brushless motors
 The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27
The brushless DC motor (BLDC) is a new type of mechatronic motor that has emerged with the development of semiconductor electronics. It is a ...2021-11-27 -
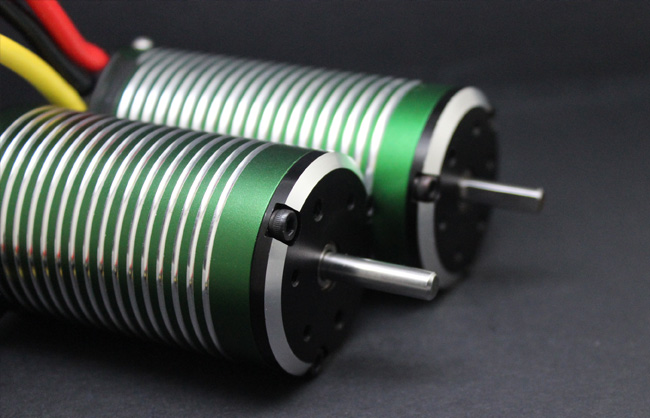
Waterproofing of brushless motors
 As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27
As you have probably already tested, a normal model airplane brushless motor is perfectly capable of operating underwater. However, when test ...2021-11-27