新闻动态
无人船怎么实现划定区域内自主巡游?
在手机划定范围,然后计算路径,使无人船按照这个路径进行自主巡游.
首先作为一个无人船系统来看的话,你的控制参考是手机给定的一个巡查范围,那么简单来处理可以认为是一个四边形区域的经纬度坐标。这个信息可以通过手机WiFi或者蓝牙发送给你的无人船,然后计算出来路径或者路径点,这个过程叫做 path planning 路径规划。
路径规划算法本身依赖于一个地图,需要一个地图的输入来告诉无人船哪里是可以航行哪里是无法航行的区域。有很多算法和工具可以实现path planning,学术界使用比较多的是机器人操作系统(ROS)框架,路径规划的软件运行于控制器(例如树莓派)上就可以实现各种基于搜索的,基于概率的,基于模型的路径规划算法。
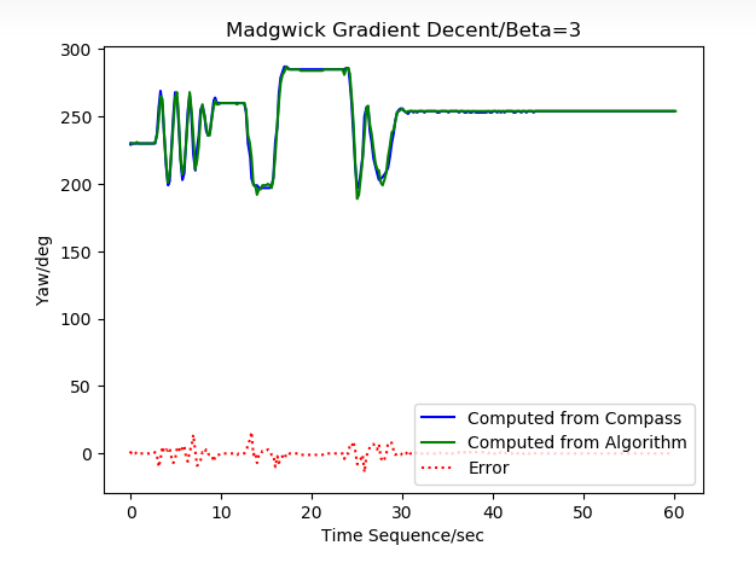
路径规划给出来的路径会作为控制参考,传递给控制器(PID,LQR,MPC等)去指导无人船控制机构(螺旋桨,舵)实现路径跟随。一个基本的控制器可以是基于位置的反馈控制,实现这样一个控制器需要位置和姿态传感器(硬件GPS,IMU)还有控制算法(软件)。
基于视觉的目标追踪是目前比较火热的一个话题,视觉在机器人学中属于感知perception一环。和手机WiFi给定目标路径一样,通过摄像头获得的目标位置也一样可以直接传递给path planning模块,在完成目标追踪之后可以切换回原有的控制路径实现继续巡航。
在开阔的水域,可以不考虑障碍物的干扰,将整个水域拆分成若干个小区块,在每个小区块的中心设置成目标点的方法既可以实现最基本的巡航控制。可以先试着从这个最基本的功能开始逐渐完善你的机器人。
精彩动态
重要新闻
-
从零开始的无人船制作-系统整体框架指南
 前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16
前言 首先无人船要无人,就得能自己跑;自己跑,就得知道它自己的GPS坐标和它自己的姿态。正如飞机一样, ...2022-06-16 -
在船体清洁机器人中引入无刷直流电机
 介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25
介绍一种专门设计的机器人,可以在船体中导航并去除累积的生物膜层。机器人设计期间的组件选择对于这款 ...2021-12-25 -
水下机器人
 如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24
如今,管理水下领域的技术已经出现,从而产生了复杂的水下机器人。 市场上存在的大部分水下机器人都专注 ...2021-12-24